
Chapter 4 Running
4.1 Trial running with no load
The goal of trial running is confirming the following items that are correct or not:
z The servo driver power supply wiring;
z The servomotor wiring;
z The encoder wiring;
z The running direction and the servomotor speed.
4.1.1 Wiring and inspection
Before turn on the power supply, confirms the servomotor:
z The servomotor has no loading on the shaft; decoupling from the machinery if already coupled.
z Because the servomotor has an impact during acceleration or deceleration, therefore the servomotor must be
fixed.
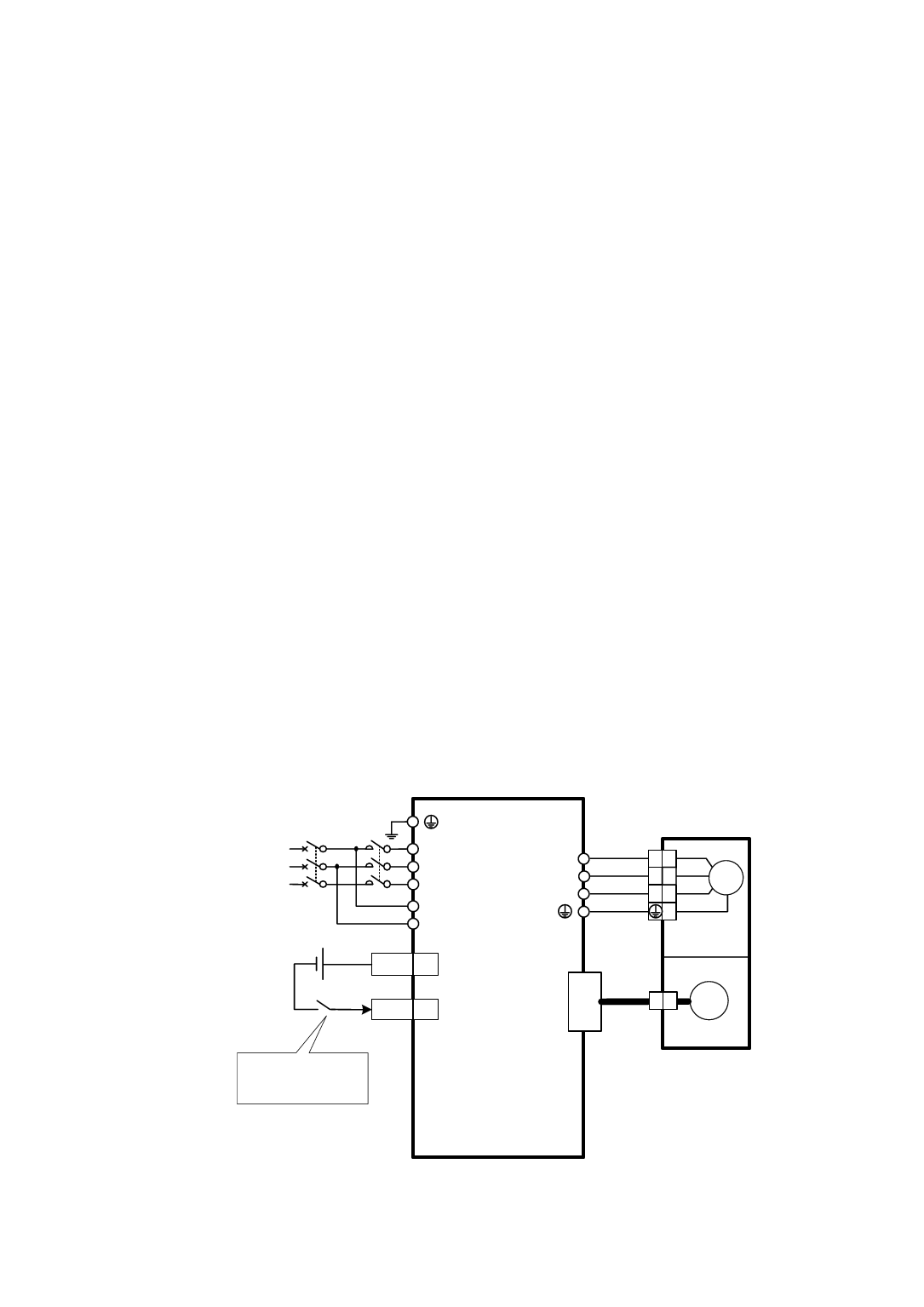
Follow the wiring chart, inspects the following items before turning on the power supply:
z The wirings are correct or not. In particular, L1, L2, L3 wirings and U, V, W wirings corresponding to the
servomotor U, V, W are correct or not.
z The input voltage is correct or not.
z The encoder cable connection is correct or not.
Three phase
AC 220V
QF
DC
12~24V
Servo ON SON
L1
L2
L3
KM
L1C
L2C
COM+ 1
X1
DI 1 14
Servomotor
U
U
V
V
M
W
W
X2
ENC
It is not need to connect
this switch if sets the
parameter P098=1
EP2 Servo drive
33
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")