
Chapter 3 Front panel operation
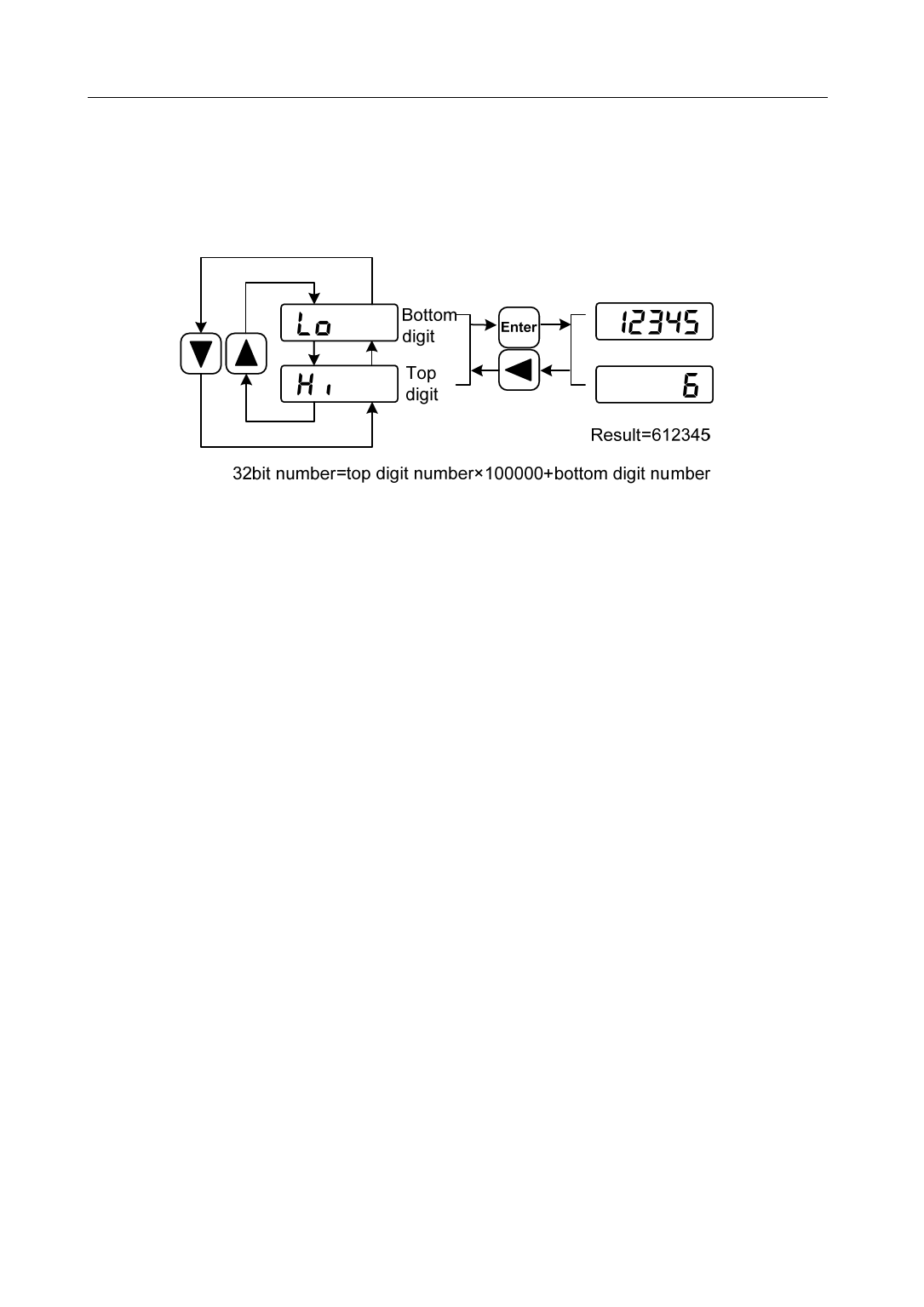
1. 32 binary bits value display [note1]
32 binary bits value translates into a decimal value that is in the range of -2147483648~147483647. It is
divided into the low portion and the top portion. Use '8' and '2' button to select the needing portion through the
menu. By the following formula, the complete value can be obtained.
2. Pulse unit [note2]
The original position command pulse is the input pulse count that has not transformed through the electronic
gear. The pulse count unit for other parts is the same with the encoder pulse unit. Take a 2500 lines encoder as the
example.
Encoder pulse unit = encoder resolution
= 4 × encoder line
= 4 × 2500( pulse / rev)
= 10000( pulse / rev)
3. Motor current [note3]
The servomotor current is Irms.
4. Peak torque and peak current [note4]
The maximum torque and maximum Irms of the servomotor in previous 10-second duration is defined as the
peak value.
5. Position command pulse frequency [note5]
The frequency of position command pulse is the actual pulse frequency before the electronic gear. The positive
number is shown as positive direction and the negative number as reverse direction.
24
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")