
2.4 Standard wiring diagram
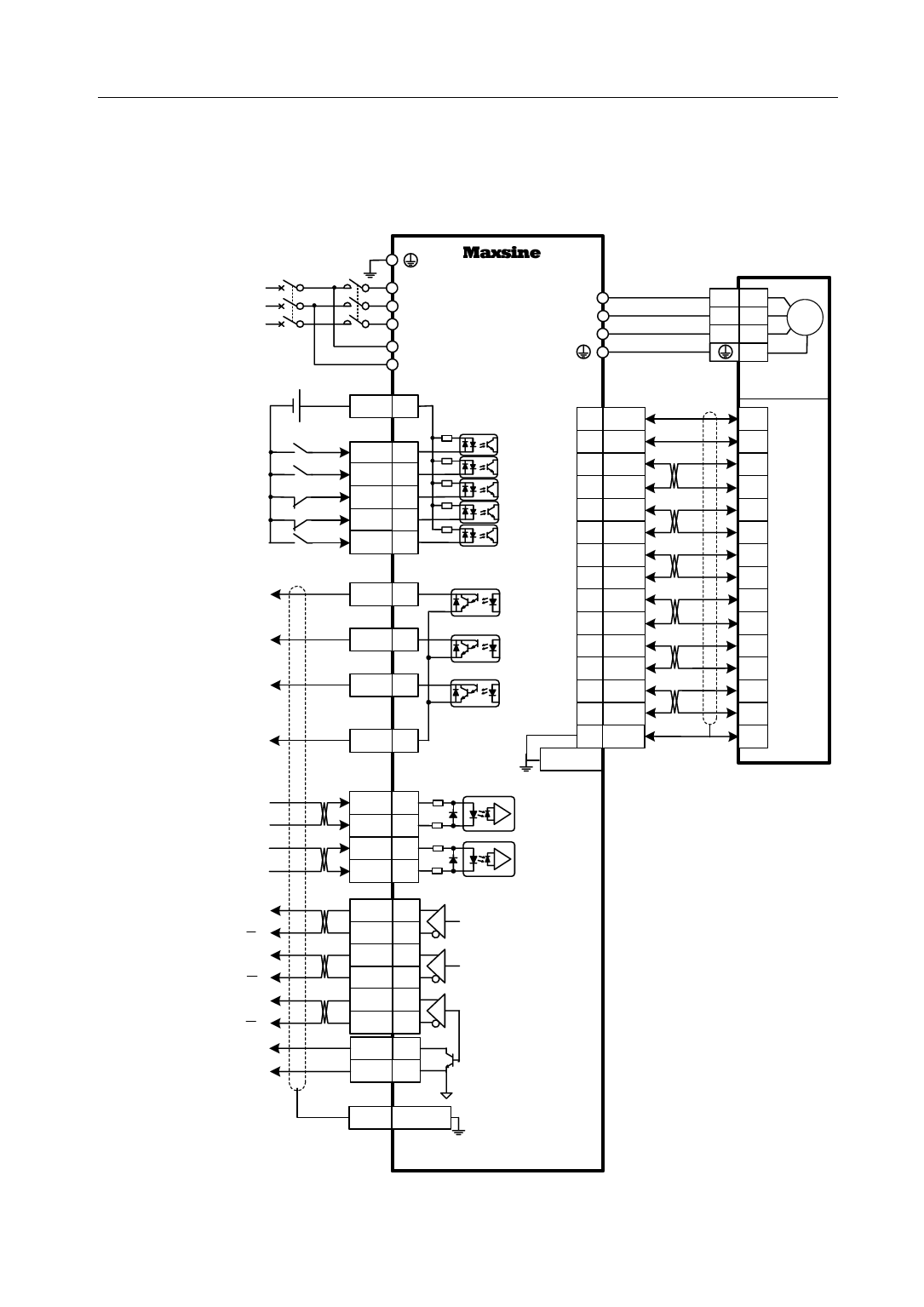
2.4.1 Wiring diagram for position control
2.4 Standard wiring diagram
3 Phase
AC 220V
QF
DC
12~24V
Servo On(SON)
Alarm Clear(ARST)
CCW Drive Inhibition(CCWL)
CW Drive Inhibition(CWL)
Position Deviation Clear(CLR)
Servo Ready(RDY)
Servo Alarm(ALM)
Electromagnetic Brake(BRK)
DO Common Terminal
Position Command(PULS)
Position Command(SIGN)
A
A
Encoder B
Signal
Outputs B
Z
Z
Z Signal Open-collector
Output
Encoder Signal Ground
EP1 Servo Drive
L1
L2
TL08F/TL12F/TL16F
U
L3
V
KM
W
L1C
L2C
COM+
X1
1
4.7kΩ
DI 1 14
DI 2 2
DI 3 15
DI 4 3
DI 5 16
DO 1
X1
4
X2
13
14
5
10
4
9
26LS32
3
Receiver 8
2
7
DO 2 17
1
6
DO 3 5
12
11
DO
COM
18
PULS+
PULS-
SIGN+
SIGN-
X1
110Ω
20
110Ω
7
110Ω
19
110Ω
6
15
X2 Metal
Case
OA+
OA-
OB+
OB-
OZ+
OZ-
X1
11
23
12
24
13
25
A
B 26LS31
Driver
Z
CZ
GND
FG
22
10
X1 Metal
Case
Signal Ground
Huada
Servomotor
U2
V3
W4
1
4 Cores Power
Connector
5V
2
0V
3
A+
4
A-
7
B+
5
B-
8
Z+
6
Optical
Z-
9 Encoder
15 Cores
U+
10 Connector
U-
13
V+
11
V-
14
W+
12
W-
15
FG
1
Note:
The DI and DO terminals
have Multi-functions
programmed by
software. Their default
settings shown in picture
can use for common
purposes. User can
modify it according to
different needs.
19
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")