
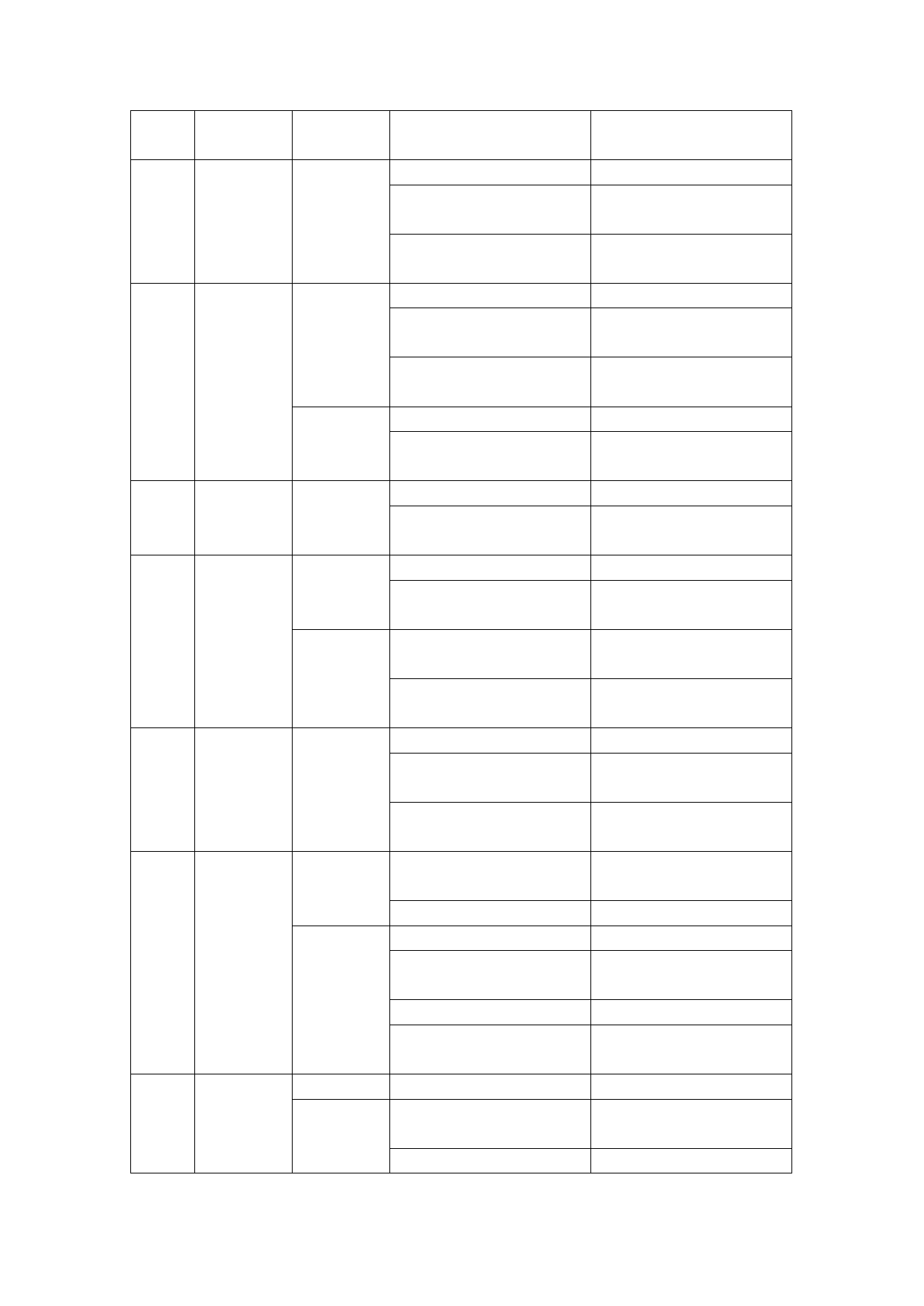
7
Disable
Power on
● Check parameters and wires
★PA20, CW and CWW wires
abnormal
8
Position
deviation
In operation
● Motor stalling
● Command frequency abnormal
★Check the load.
★ Reduce the speed of the upper
counter overflow
computer.
●Wiring incorrect
★Check the wire and connect the
shielding layer.
9
Encoder failure Power on
●Encoder wiring incorrect
●Encoder damaged
★ Connect the wire correctly.
★ The encoder is a fragile article and
should be replaced.
● Encoder 5V voltage low
★Shorten the wire or replace the
driver.
In operation
● CN2 connector contact poor
●Hidden trouble exists in cable faulty
★Tighten the CN2 connector.
★Replace the cable.
10
Software failure Power on
welding.
●software download mismatching
●The chip of the circuit board failure
★Update the software.
★Find out the interference and replace
the driver.
11
IPM module Power on
●Circuit board failure
★Replace the servo driver.
failure
● Short circuit between U, V and W of ★ Check the wire and replace the
In operation
the motor
● Motor failure
motor.
★Check the wire and replace the
motor.
● Poor connection to power supply
★ Check the wire and prevent
interference.
12
Overcurrent
Power on or in
operation
● Motor damaged
●Short circuit between U, V and W
★Replace the motor.
★Check the wire and replace the servo
driver.
●Overload
★Replace the current motor by a
high-power motor.
13
Overload
Power on
● The motor is damaged and water has ★Replace the motor.
In operation
entered the motor.
●Circuit board failure
● Mechanical load too great
●Mechanical transmission not freely
★Replace the servo driver.
★Reduce the load.
★Check Mechanical transmission
parts.
●Short circuit between U, V and W
●The band-type brake fails to loosen.
★Check the cable.
★Ensure that power supply for the
band-type brake is stable.
14
Brake failure
Power on
In operation
●Circuit board failure
●Braking resistor damaged
★Replace the servo.
★Check the wire of the braking
resistor.
●Braking capacity insufficient
★
Prolong
the
68
 AL301 All-Digital AC Servo Driver Connection and Debugging Manual")
 AL301 All-Digital AC Servo Driver Connection and Debugging Manual")
 AL301 All-Digital AC Servo Driver Connection and Debugging Manual")
 AL301 All-Digital AC Servo Driver Connection and Debugging Manual")
 AL301 All-Digital AC Servo Driver Connection and Debugging Manual")
 AL301 All-Digital AC Servo Driver Connection and Debugging Manual")
 AL301 All-Digital AC Servo Driver Connection and Debugging Manual")
 AL301 All-Digital AC Servo Driver Connection and Debugging Manual")
 AL301 All-Digital AC Servo Driver Connection and Debugging Manual")