
Chapter VII Failures and Diagnosis
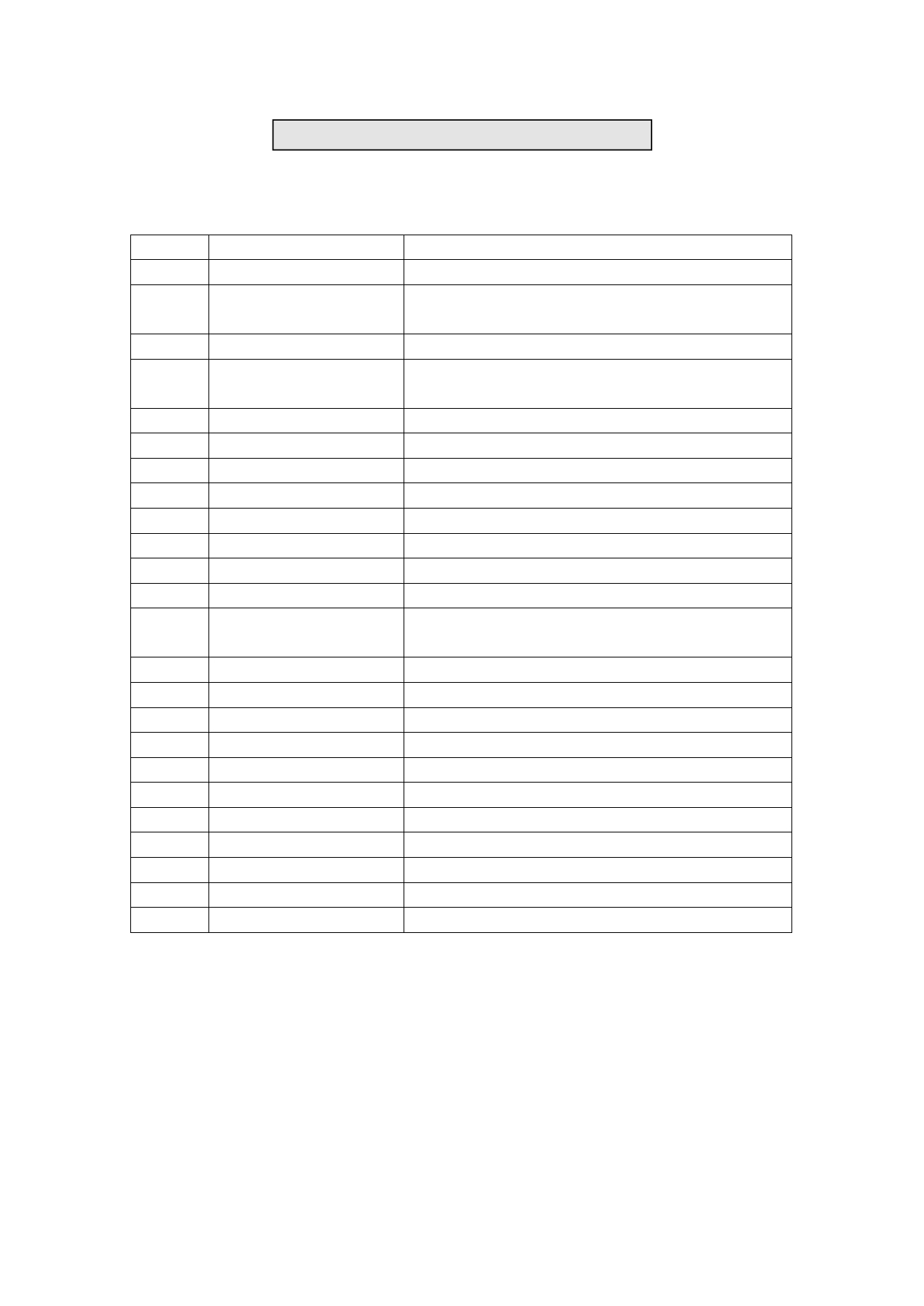
List of Alarms
Alarm No.
1
2
Alarm Name
Overspeed
Main circuit overvoltage
3
Main circuit undervoltage
4
Positive overproof
5
Motor overheat
6
Motor stalling
7
Driver disablement abnormal
8
Position deviation counter overflow
9
Encoder failure
10
Software failure
11
IPM module failure
12
Overcurrent
13
Overload
14
Brake failure
15
Encoder count incorrect
16
Motor thermal overload
17
Speed response failure
19
Hot reset
20
EEPROM failure
23
Housing electric leakage failure
29
User torque overload alarm
30
Encoder Z-pulse loss
31
Encoder UVW signal broken
32
Encoder UVW signal interference
(Table 7.1)
Failure Diagnosis
The speed of the servo motor exceeds the set value.
The voltage of three-phase or two-phase power supply is too high or the brake
fails to work.
The voltage of three-phase or two-phase power supply is too low.
The value of the position deviation counter exceeds the set value and or the
voltage is too low.
The temperature of the motor is too high.
The motor is jammed and unable to rotate freely, or the load is too great.
CCW and CW has no input or Parameter Pa20 is not 1.
The absolute value of the value of the position deviation counter exceeds 230.
The signal of the encoder is incorrect.
The chip of the circuit board fails.
IPM intelligent module fails.
The current of the motor is too great.
The driver and the motor overloads (instantaneous overcurrent ) and are unable
to rotate freely.
The braking resistor or circuit fails.
Encoder count abnormal.
The electric thermal value of the motor exceeds the set value.
Speed error is too great for a long time.
The system is hotly reset.
EEPROM incorrect.
External short circuit or the motor leakage
The load of the motor exceeds the value and duration set by the user.
Encoder Z-pulse incorrect.
Encoder UVW signal is incorrect or not matched to the encoder.
All-high electrical level or all-low electrical level exists in UVW signal.
66
 AL301 All-Digital AC Servo Driver Connection and Debugging Manual")
 AL301 All-Digital AC Servo Driver Connection and Debugging Manual")
 AL301 All-Digital AC Servo Driver Connection and Debugging Manual")
 AL301 All-Digital AC Servo Driver Connection and Debugging Manual")
 AL301 All-Digital AC Servo Driver Connection and Debugging Manual")
 AL301 All-Digital AC Servo Driver Connection and Debugging Manual")
 AL301 All-Digital AC Servo Driver Connection and Debugging Manual")
 AL301 All-Digital AC Servo Driver Connection and Debugging Manual")
 AL301 All-Digital AC Servo Driver Connection and Debugging Manual")