
INH(指令脉冲禁止)INH (command pulse disabled)
SC2(速度选择 2)SC2 (speed selection 2) FIL
(CCW 转矩限制)FIL (CCW torque limit) RIL(CW
转矩限制)RIL (CW toque limit) CLE(偏差计数器
清零)CLE (deviation counter reset) SC1(速度选择
1)
SC1 (speed selection 1)
ZEROSPD(零速箝位) ZEROSPD (zero position clamping) RSTP
(CW 驱动禁止) RSTP (CW driver disabled) FSTP
(CW 驱动禁止) FSTP (CW driver disabled) ALRS(报警 清除)
ALRS (Alarm clearance)
SRV-ON(伺服使能)SRV-ON (servo enable)
(When strokes lighten and there is signal input, the input terminal is ON; when it goes out, the input terminal is
disconnected to OFF.)
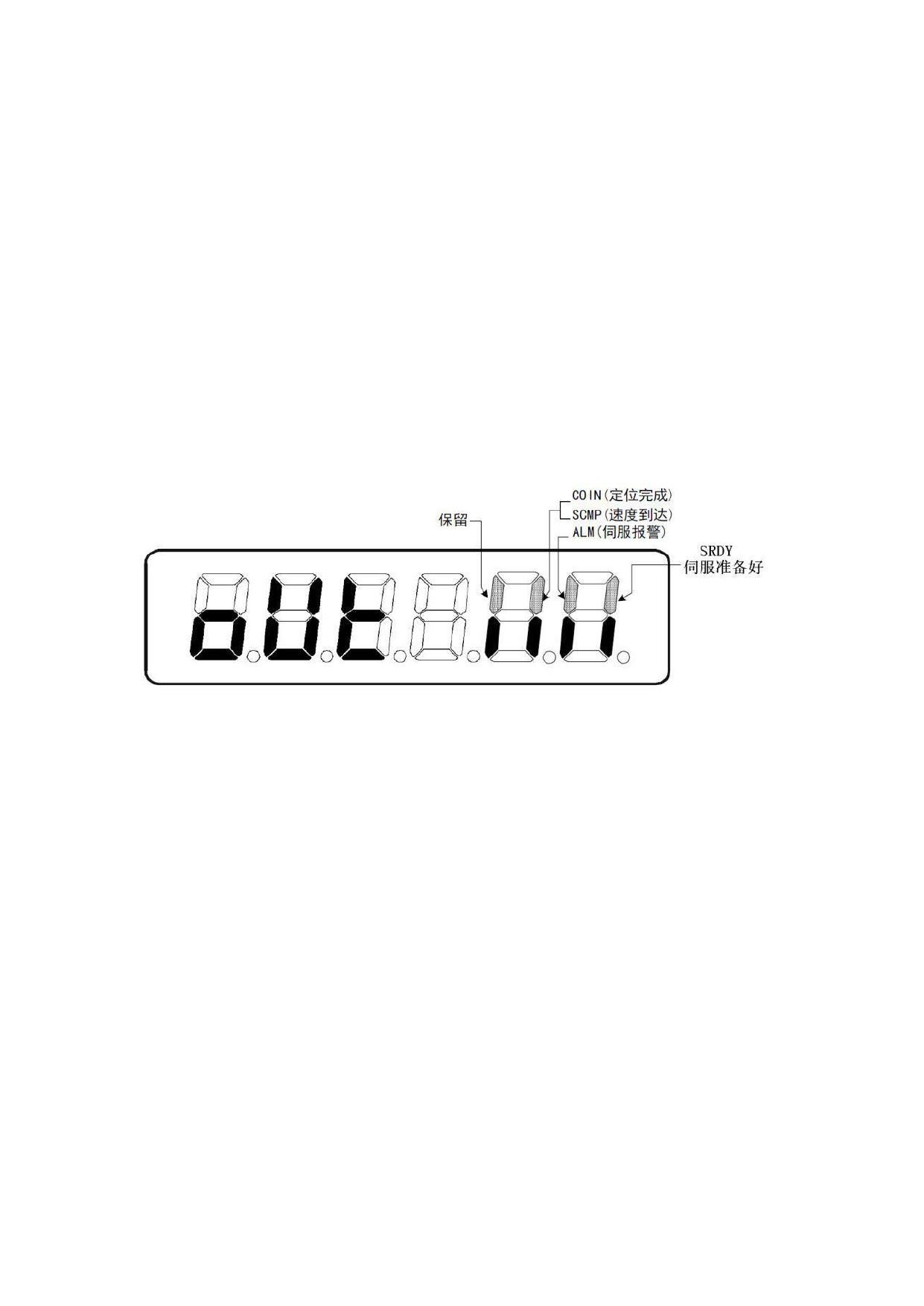
6. The display of the output terminal status is shown in the following figure:
Figure 5.3 Display of Input Terminal Status
(When strokes lighten and there is signal input, the input terminal is ON; when it goes out, the input terminal is
disconnected to OFF.)
保留 Retained
COIN(定位完成)COIN (positioning done)
SCMP(速度到达)SCMP(speed reached)
ALM(伺服报警)ALM(servo alarm)
SRDY 伺服准备好 SRDY(servo ready)
7. The display of the encoder status is shown in the following figure:
49
 AL301 All-Digital AC Servo Driver Connection and Debugging Manual")
 AL301 All-Digital AC Servo Driver Connection and Debugging Manual")
 AL301 All-Digital AC Servo Driver Connection and Debugging Manual")
 AL301 All-Digital AC Servo Driver Connection and Debugging Manual")
 AL301 All-Digital AC Servo Driver Connection and Debugging Manual")
 AL301 All-Digital AC Servo Driver Connection and Debugging Manual")
 AL301 All-Digital AC Servo Driver Connection and Debugging Manual")
 AL301 All-Digital AC Servo Driver Connection and Debugging Manual")
 AL301 All-Digital AC Servo Driver Connection and Debugging Manual")