
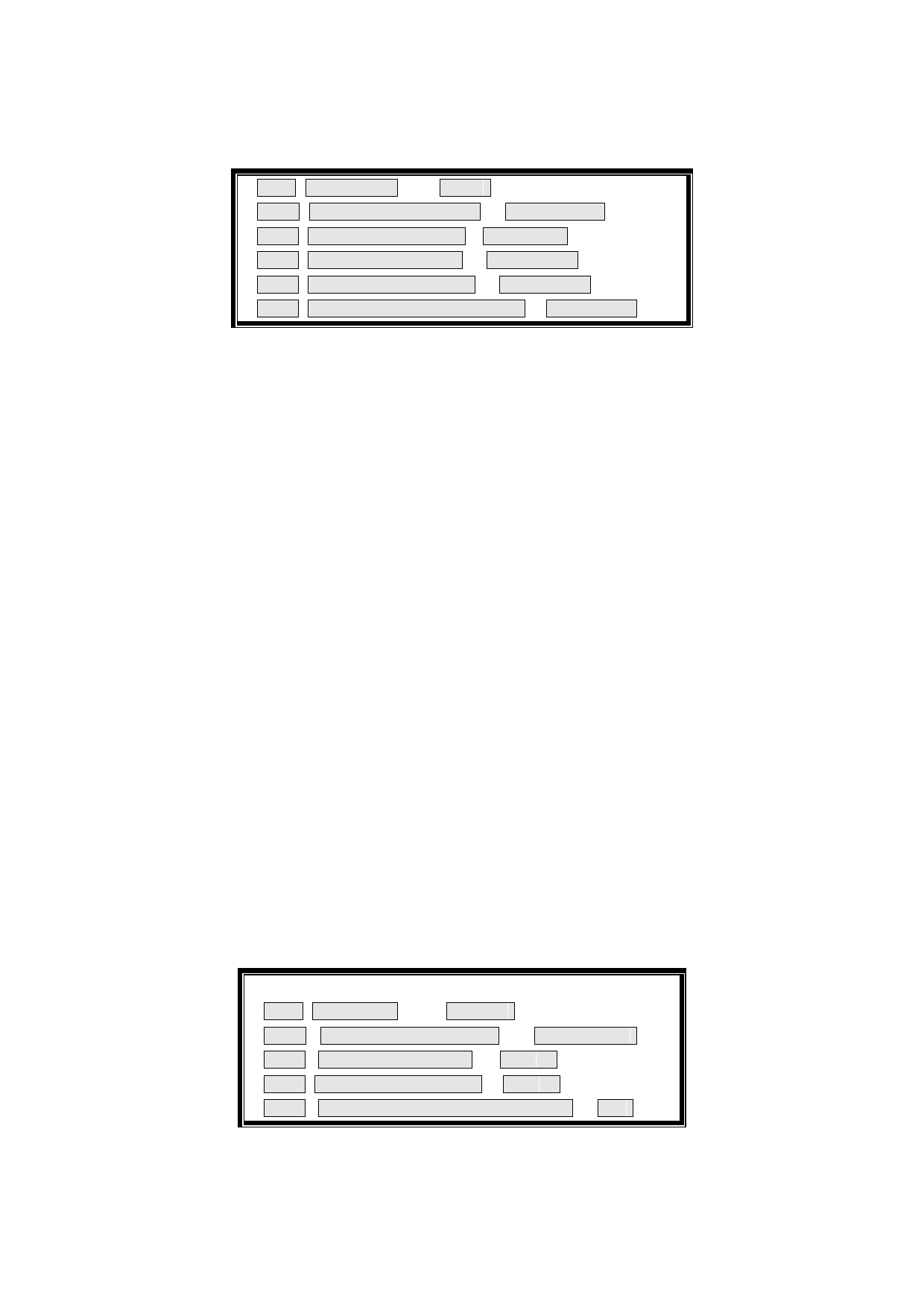
PA--4 --Control mode Set to 6
PA--20--Driver disablement ineffective Factory value=1
PA-40 -- Acceleration time constant Set as required
PA-41 -- Deceleration time constant Set as required
PA-43 -- Analog speed command gain Set as required
PA-45 -- Analog speed zero drift compensation Set as required
Table 8.3 Adjustment of Key Parameters of Torque Control
8.5 Dynamic Electronic Application
● Mainly used for application of position control.
●Dynamic electronic application
Dynamic electronic application refers to dynamically switching the electronic gear proportion via the
make-and-break of the input terminal during the operation of the servo driver.
● It is mainly reflected on the limit of the maximum output frequency of the upper computer. When the
proportion value of the electronic gear is very small, pulse resolution is high and the maximum speed can
not be reached. However, in order to reach the maximum speed, the proportion value of the electronic gear
of the upper computer is very great at this time. Low position resolution can affect transmission precision.
(May appear system two microns instructions, system to send a pulse). In order to improve speed and
transmission precision, multiple electronic gears with different gear ratios are added for switching so as to
achieve better effect.
● Example: In the application of CNC machines, set the first electronic gear ratio ―1/1‖ ―PA12/PA13‖, the
second electronic gear ratio ―10/1‖―PA52/PA13‖.
……………….
G91 G01 X 10 F100 // The first electronic gear ratio is 1:1, it is 10 mm.
M 16 // PLC for Code M of the NC machine outputs a point to make INH have a signal.
G91 G01 X10 F100 // The second electronic gear ratio is 10:1, it is 100 mm.
M17 //数控机床 M 代码 PLC 关闭 INH 信号
M17 // PLC for Code M of the NC machine closes the INH signal.
M30 // Program ends.
PA--4 --Control mode Set to zero
PA--20—Driver disablement ineffective Factory value =1
PA-12 -- Electronic gear numerator 1
PA-13 -- Electronic gear denominator 1
PA-52 -- Numerator of the second electronic gear ratio 1
Table 8.4 Adjustment of Parameters of Electronic Gear Ratios
73
 SBF S M Series Connection and Debugging Manual for All-Digital AC Servo Driver V116")
 SBF S M Series Connection and Debugging Manual for All-Digital AC Servo Driver V116")
 SBF S M Series Connection and Debugging Manual for All-Digital AC Servo Driver V116")
 SBF S M Series Connection and Debugging Manual for All-Digital AC Servo Driver V116")
 SBF S M Series Connection and Debugging Manual for All-Digital AC Servo Driver V116")
 SBF S M Series Connection and Debugging Manual for All-Digital AC Servo Driver V116")
 SBF S M Series Connection and Debugging Manual for All-Digital AC Servo Driver V116")
 SBF S M Series Connection and Debugging Manual for All-Digital AC Servo Driver V116")
 SBF S M Series Connection and Debugging Manual for All-Digital AC Servo Driver V116")