
5.2.1 Status Monitoring Mode (DP- -)
DP-SPD --Motor speed r 1000 --1000 rpm
DP-POS -- Current position lower 5 digit→ P80829 --80829 pulses
DP-POS.-- Current position higher 5 digit → P 11 --110000 pulses
DP-CPO --Position command lower 5 digit C81410 -- 81410 pulses
DP-CPO.--Position command higher 5 digit C 22 --220000 pulses
DP-EPO --Position deviation lower 5 digit E 9 --9 pulses
DP-EPO.--Position deviation higher 5 digit E 0 -- 0 pulses
DP-TRQ—Motor torque (%) T 60 -- Motor torque(70%)
DP-- 1 -- Motor current(A) 1 4.5 -- Motor current(4.5A)
DP-LSP -- Z pulse count 80829 -- the number of Z pulses
DP-CNE -- Current control mode CNE 0 -- Control mode 0
DP-FRQ -- position command frequency r 1000 --1000rpm
DP- CS --Speed command r. 35 --Speed command 35rpm
DP- Ct --Torque command t. 70 -- Torque command 20%
DP-APO --Rotor absolute position A 3325 -- 3325 pulses
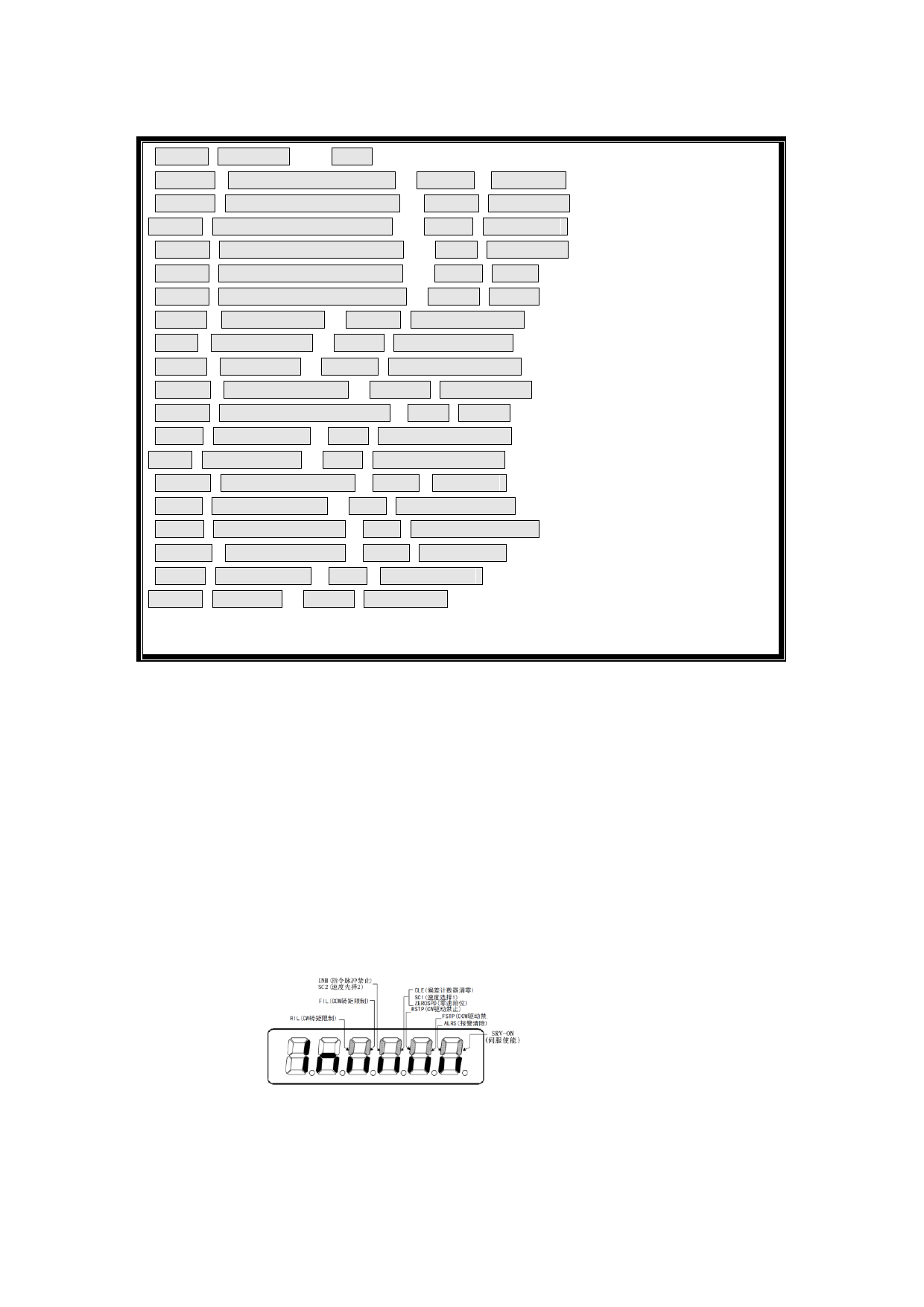
DP--IN --Input terminal status lnhllhl-- Input terminal status
DP-Out -- Output terminal status outllhl-- Output terminal status
DP-COD -- Encoder input signal cod lh-- Encoder signal
DP- RN --Operation status rn -on -- Motor is running
DP-ERR --Alarm code Err 9 -- Alarm Code 9
Table 5.2 Table of Monitoring
1. The input pulse value is a pulse that is magnified by an input electronic gear.
2. The unit of the pulse value is the unit of the internal pulse of the servo, 10000 pulses per revolution.
3. Display of Operation Statuses
―CN-OFF‖ means that the heavy current for the servo is not switched on.
―CN-CH‖ means that the heavy current for the servo is switched on, but enabling is not switched on.
―CN-ON‖ means that the heavy current for the servo and the enabling are switched on and that the servo is in
operation state.
4. The absolute position of the rotor in one revolution refers to the position of the rotor relative to the stator in one
revolution. One revolution is a cycle with a range of 0-9999. The electronic gear ratio is not used in calculations.
5. The display of the input terminal status is shown in the following figure:
Figure 5.2 Display of Input Terminal Status
48
 SBF S M Series Connection and Debugging Manual for All-Digital AC Servo Driver V116")
 SBF S M Series Connection and Debugging Manual for All-Digital AC Servo Driver V116")
 SBF S M Series Connection and Debugging Manual for All-Digital AC Servo Driver V116")
 SBF S M Series Connection and Debugging Manual for All-Digital AC Servo Driver V116")
 SBF S M Series Connection and Debugging Manual for All-Digital AC Servo Driver V116")
 SBF S M Series Connection and Debugging Manual for All-Digital AC Servo Driver V116")
 SBF S M Series Connection and Debugging Manual for All-Digital AC Servo Driver V116")
 SBF S M Series Connection and Debugging Manual for All-Digital AC Servo Driver V116")
 SBF S M Series Connection and Debugging Manual for All-Digital AC Servo Driver V116")