
FC300
Chapter 4 Detailed Parameter Description
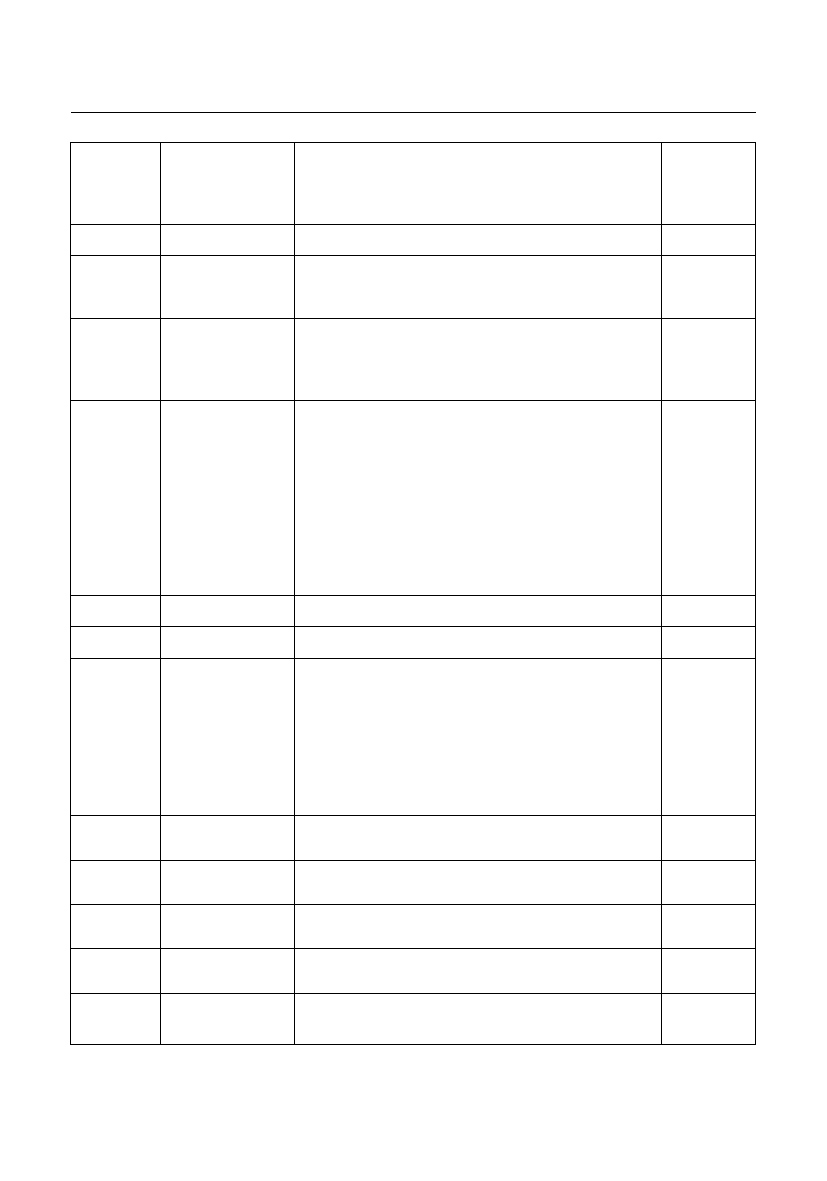
P023
P024
P025
P026
P027
P028
P029
P030
P031
P032
P033
P034
P035
Lowest output
frequency
Reserved
Keypad jog
control
Jog frequency
Jog relative
parameters
Reserved
Reserved
Setting range:0.0 Hz-highest operation frequency
Set the lowest inverter output frequency which the
motor allows. If running frequency is set lower than
this frequency, inverter stops output.
Setting range:
0, Forbids keypad jog operation;
1, Allows keypad jog operation.
Setting range: lowest operation frequency-highest
frequency
Set the frequency value inverter outputs when
receiving jog commands.
This parameter consists of four hexadecimal digits,
each of which represents a different function.
D0: Jog direction control
0, Forward;
1, Reverse;
2, (others), forward and reverse both allowed.
D1: Jog acceleration & deceleration time choice
1-4, respectively correspond to first to fourth
acceleration & deceleration time;
0, (orothers), chosen by external control signal.
Reserved
Reserved
First frequency
Settingrange: lowest operation frequency-highest
frequency
When speed command (P064) is 0, this frequency is
involved in running as the first frequency. This
parameter can be modified by▲▼keys on operation
panel directly, with automatic memory when power is
off.
Second
frequency
Third frequency
Fourth
frequency
Fifth frequency
Sixth frequency
Setting range:lowest operation frequency-highest
frequency
Setting range:lowest operation frequency-highest
frequency
Setting range:lowest operation frequency-highest
frequency
Setting range: lowest operation frequency-highest
frequency
Setting range:lowest operation frequency-highest
frequency
1.0Hz
1
5.0Hz
0002
50.0Hz
2.0Hz
3.0Hz
4.0Hz
5.0Hz
6.0Hz
23
 BEST FC300 High-Performance Frequency Inverter Series User Manual")
 BEST FC300 High-Performance Frequency Inverter Series User Manual")
 BEST FC300 High-Performance Frequency Inverter Series User Manual")
 BEST FC300 High-Performance Frequency Inverter Series User Manual")
 BEST FC300 High-Performance Frequency Inverter Series User Manual")
 BEST FC300 High-Performance Frequency Inverter Series User Manual")
 BEST FC300 High-Performance Frequency Inverter Series User Manual")
 BEST FC300 High-Performance Frequency Inverter Series User Manual")
 BEST FC300 High-Performance Frequency Inverter Series User Manual")