
- You are here:
- AM.CO.ZABuythisCNC Utilities Homepage
- EasyRoute-CNC-Router
- Component Manuals
- 华大系列说明书116版(英文)修改后.pdf
- Page 70 of 100
Chapter VIII Debugging and Application
8.1 Notices to Quick Debugging
I. Confirm that wiring is correct.
● R, S, T and U, V, W should not be connected reversely and loosely.
● Check whether the input voltage is three-phase 220V or single-phase 220V.
● Check that Pin 18 in CN1 interface is correctly connected with +24V and that Pins 36 and 9 in CN1
interface are correctly connected with 0V. Poles should not be connected reversely.
● Check that +5V in CN2 interface is correctly connected. Poles should not be connected reversely.
● Check whether the cable for the motor is short circuited or grounded.
● The wiring for the same motor should correspond to the same driver.
II. Determine Energizing Sequence.
● The heavy current and control electricity of DO-1000 series of servos are electrified at the same time.
● If the brake of the band-type brake motor is not controlled by the servo, the brake should not be
electrified until the servo is enabled for more than 1 second. Only in this way can the position
precision and safety of the equipment be guaranteed.
● Due to integrated design of the heavy current and control of DO-1000 series of servos and adoption of
power-down delay discharge, the internal heavy current is immediately cut off after power supply is
cut off and the delay discharge of display and control circuits automatically cuts off after several
seconds.
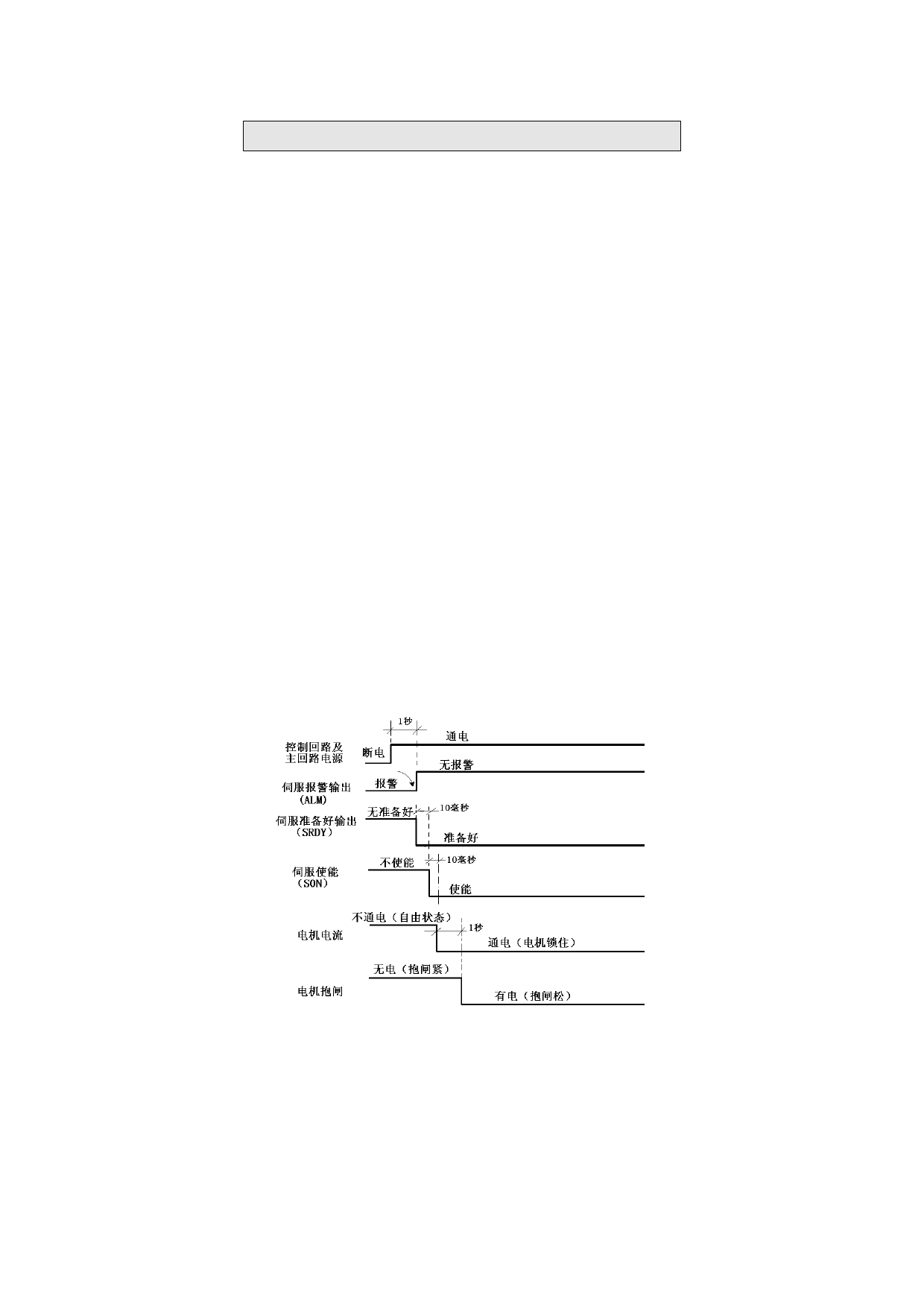
For successful use of DO-1000 series of drivers, please carefully read the sequence diagram below:
Figure 8.1 Sequence Diagram for Energizing and Alarm
控制回路及主电路电源
断电
1秒
通电
Control circuit and main circuit power supply
Power down
1s
Power on
伺服报警输出(ALM)
报警
无报警
Servo alarm output (ALM) Alarm
No alarm
伺服准备好输出(SRDY)
无准备好
10毫秒
准备好
70
 华大系列说明书116版(英文)修改后")
 华大系列说明书116版(英文)修改后")
 华大系列说明书116版(英文)修改后")
 华大系列说明书116版(英文)修改后")
 华大系列说明书116版(英文)修改后")
 华大系列说明书116版(英文)修改后")
 华大系列说明书116版(英文)修改后")
 华大系列说明书116版(英文)修改后")
 华大系列说明书116版(英文)修改后")