frequency is and the faster the speed feedback response is. Where a faster
speed response is needed, the set value can be decreased appropriately.
9
Position
a. Used to set the proportional gain of the position loop regulator.
proportional b. The greater the set value is, the greater the gain is, the greater the rigidity is,
gain
and the smaller the hysteretic value of position under the same condition of
frequency command pulse. However, A too great set value may lead to
oscillation or overshooting.
c. The value of the parameter is determined according to the specific model of
the servo driver system and load condition.
10
Position
a. Used to set the feed-forward gain of the position loop.
feed-forward b. When the feed-forward gain is set to 100%, it means that the hysteretic
gain
value of position is always zero under the command pulse of any frequency.
c. Increase of feed-forward gain of the position loop is able to improve the
high speed response characteristic of the control system, but it makes the
position loop of the control system unstable and easily produce oscillation.
d. The feed-forward of the position loop generally is zero unless a very high
response characteristic is needed.
11
Cut-off
a. Used to set the cut-off frequency of the low-pass filter of the position loop
frequency of feed-forward value.
position
b. The function of this filter is to increase the stability of composite position
feed-forward
control.
filter
12
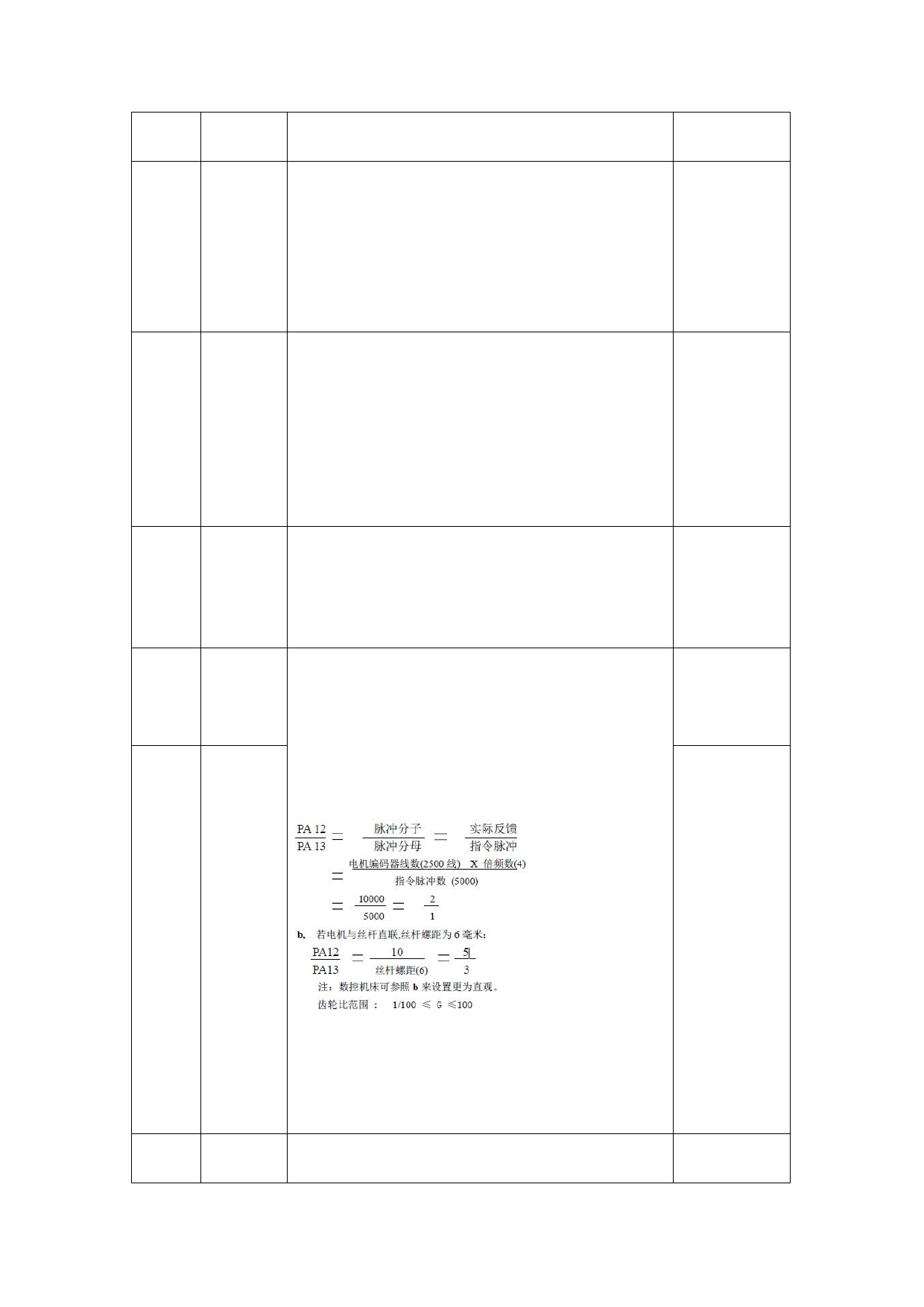
Count down a. Where the program of the system makes lead screw move 5 mm (5000
numerator of pulses), the motor needs to rotate one revolution.
position
PA12/PA13=Pulse numerator/Pulse denominator= Actual feedback/Command
command
pulse
13
Count down =The number of wires for the motor encoder (2500 wires) x the number of
denominator frequency doublings (4)
of position =10000/5000=2/1
command
1-500
[ 40 ]
0-100
[ 0 ]
1-1200
[ 300 ]
1-32767
[1 ]
1-32767
[ 1 ]
b. Where the motor is connected directly to the lead screw with a pitch of
6mm:
PA12/PA13=10/lead screw pitch(6)=5/3
Note: a NC machine can be set more visually by referring to b.
Range of gear ratio: 1/100≤G≤100
14
Input mode Three types of pulse input modes can be set:
0-2
for position 0: pulse + sign
[ 0 ]
58

 华大系列说明书116版(英文)修改后")
 华大系列说明书116版(英文)修改后")
 华大系列说明书116版(英文)修改后")
 华大系列说明书116版(英文)修改后")
 华大系列说明书116版(英文)修改后")
 华大系列说明书116版(英文)修改后")
 华大系列说明书116版(英文)修改后")
 华大系列说明书116版(英文)修改后")
 华大系列说明书116版(英文)修改后")