
RDC644XG Controller User Manual
Chapter 6 Interface Examples of Step-servo Motor Driver
6.1 Brief Introduction
The input signal end of step-servo motor driver employs the opto-isolator technology. For the
step pulse signal, some isolate the side OC diode from cutoff to conduction (e.g. the valid falling
edge of pulse signal inputted from the diode minus end) and some do so from conduction to cutoff
(e.g. the valid rising edge of pulse signal inputted from the diode minus end).
When it is indicated whether the pulse signal of motor driver is the valid rising edge or
the valid falling edge, it will be subject to the pulse signal inputted from the minus end of
side OC diode.
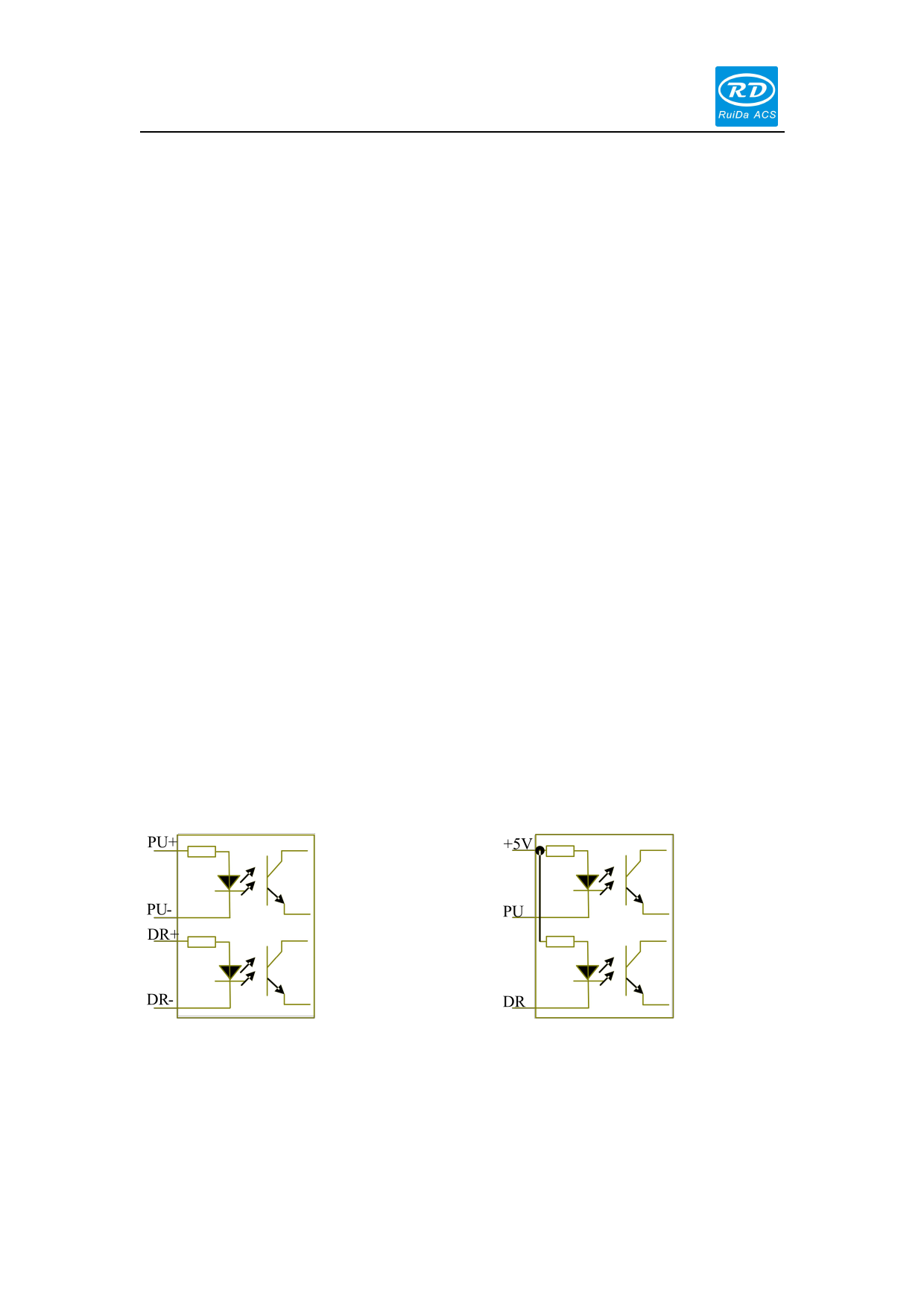
Some input signals of motor driver are independent and some are internally of common
anode, so some have 4 external leading-out wires and some 3 wires (only the pulse and directional
signals are counted) as shown in Figure 6.1-1 and 6.1-2.
RDC644XG Controller has four groups of 3-wires motion driver interface, each interface has
one direction signal, one pulse signal, and one 5V positive output, the direction signal and the
pulse signal are all OC output.
RDC644XG controller must be common anode with the motor driver. The polarity of
the direction signal can be changed in the factory parameters, and the valid edge of the pulse
signal can also be changed.
Figure: 6.1-1 Four Inputs, Independent
Input Signal of Driver
Figure: 6.1-2 Three Inputs, Common-anode
Input Signal of Driver
23 / 51
© 2016 Ruida Technology. All Rights Reserved.
 RDC644XG Laser Controller User Manual")
 RDC644XG Laser Controller User Manual")
 RDC644XG Laser Controller User Manual")
 RDC644XG Laser Controller User Manual")
 RDC644XG Laser Controller User Manual")
 RDC644XG Laser Controller User Manual")
 RDC644XG Laser Controller User Manual")
 RDC644XG Laser Controller User Manual")
 RDC644XG Laser Controller User Manual")