
Portable Plasma Torch Height Controller Manual (F1620)
17. P20:The time of descending rapidly during the dual speed IHS. During the
dual speed IHS, at first, motor descend by fastest speed in this time. Then motor
descend by lowest speed until collision have happened(lowest speed= fastest
speed /4). If user set it as 0, motor will descend by fastest speed/4.
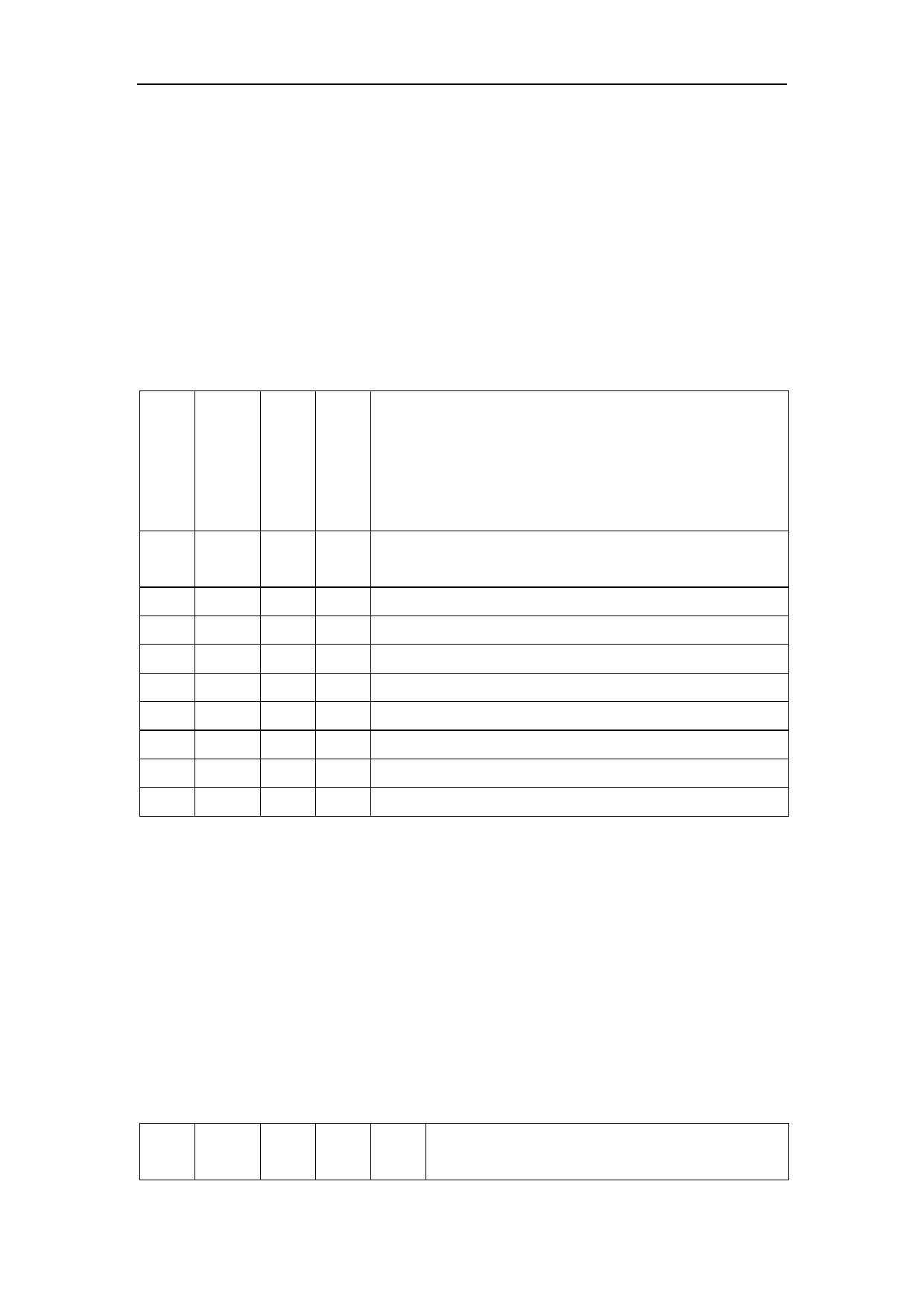
“Hxx”submenu listing
High/low level of input display in red LED. If LED display 0, input is low level.
If LED display 1, input is high level.
Para Param Yell Red Remark
mete eter ow LED
r scope LED
num
ber
H01 0 or 1 H01 0 The signal level condition of CNC_AUTO/
MANUAL
H02 0 or 1 H02 0 The signal level condition of CNC_THC_UP
H03 0 or 1 H03 0 The signal level condition of CNC_THC_DN
H04 0 or 1 H04 0 The signal level condition of CNC_IHSAON
H05 0 or 1 H05 0 The signal level condition of CNC_EXAON
H06 0 or 1 H06 0 The signal level condition of UP_LIMIT
H07 0 or 1 H07 0 The signal level condition of DN_LIMIT signal
H08 0 or 1 H08 0 The testing signal of Torch retaining cap collision
H09 0 or 1 H09 0 The testing signal of proximity switch
“Lxx”submenu listing
High level effective or low level effective of input signal is displayed in red
LED. If user set it as 0, the effective level of input is low. If user set it as 0, the
effective level of input is high. When low level is effective and the actual level of
input signal is 0, it means this signal have happened. For example, when user
set“L05”as 0 and “H05”display 0, it means this signal is useful at now. It can explain
that the arc start signal which have IHS and send by CNC is useful. If “H05”display 1,
it mean CNC can not send arc start signal which have IHS.
Default of input is low level effective. User can change it on the basis of actual
condition.
Para Param Defa Yell Red Remark
mete eter ult ow LED
16
 THC System Manufacture Manual F1620")
 THC System Manufacture Manual F1620")
 THC System Manufacture Manual F1620")
 THC System Manufacture Manual F1620")
 THC System Manufacture Manual F1620")
 THC System Manufacture Manual F1620")
 THC System Manufacture Manual F1620")
 THC System Manufacture Manual F1620")
 THC System Manufacture Manual F1620")