
ACD320 user manual
Parameter Description
begin the procedure of the motor parameters self-learning. At this time, TUN-0 is displayed.
After the motor is started, TUN-1 is shown and RUN light is flickering.
When the self-learning of parameters is finished, -END- is displayed, and finally back to the
stop state interface.
When -TUN- is blinking, the process of parameters self-learning can exit by pushing the
button PRGM/RESET .
During the process of parameters self-learning, it can be stopped by pressing the button
STOP.
Please note, the start and stop of the parameters self-learning can only be done through
keypad. Once the parameter self-learning is finished, this function code automatically restores to
0.
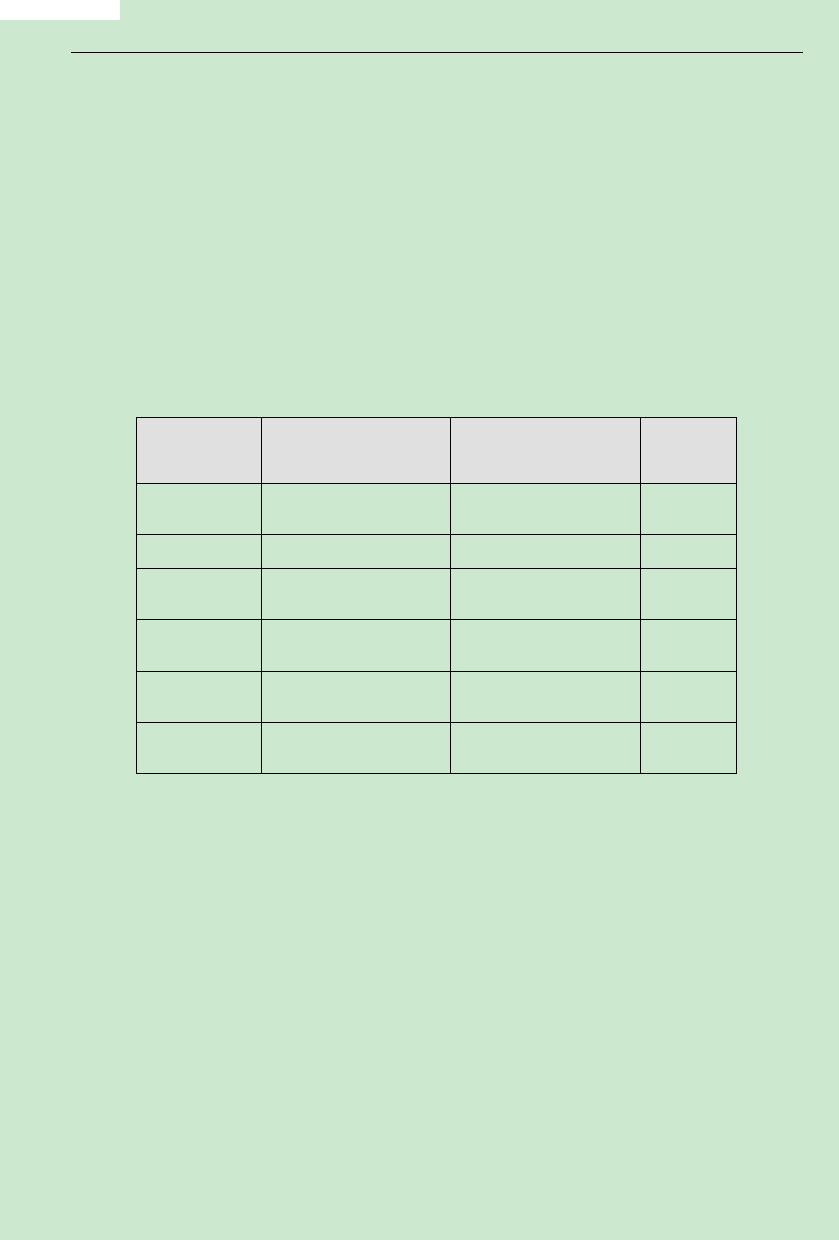
Function Code
Name
Setting Range
Default
Value
Speed loop proportional
F1.12
0~100
30
gain1
F1.13
Speed loop integral time1
0.01~10.00s
0.50s
F1.14
F1.15
F1.16
Switching low
point frequency
Speed loop proportional
gain 2
Speed loop integral
time 2
0.00Hz~F1.1 7
0~100
0.01~10.00s
5.00Hz
25
1.00s
F1.17
Switching high
point frequency
F1.14~F0.04
10.00Hz
Above parameters are valid only to vector control, but invalid toV/F control.When the
frequency is less than the switching frequency point 1 (F1.14), the speed loop PI parameters are
F1.12 and F1.13.When frequency is higher than the switching frequency point 2 (F1.17),the
speed loop PI parameters are F1.15 and F1.16. Between the switching points, PI parameter is
acquired according to the line type variation of the two group parameters, as shown in following
figure.
- 66-
 KR Inverter ACD320 Series Manual")
 KR Inverter ACD320 Series Manual")
 KR Inverter ACD320 Series Manual")
 KR Inverter ACD320 Series Manual")
 KR Inverter ACD320 Series Manual")
 KR Inverter ACD320 Series Manual")
 KR Inverter ACD320 Series Manual")
 KR Inverter ACD320 Series Manual")
 KR Inverter ACD320 Series Manual")